
本站主营产品:手拉葫芦
版权所有 Copyright(C)2009-2012 北京市凌鹰起重机械厂 备案号 京ICP备11048170号-5
销售热线:18611422090
传真:010-58043523
邮箱:beijinglingying@126.com 邮编:102200
北京凌鹰起重机械厂产品涵盖手拉葫芦、手扳葫芦、电动葫芦、吊装带、起重链条、滑轮、吊钩、吊具、紧线器、钢丝绳等。凌鹰公司是手动葫芦的生产基地。是一家集研发设计、精工制造、进出口贸易、网销为一体的起重机械专业厂家,公司创建于1998年。经过多年的努力,拥有了起重行业的优质产品,创立了自己的品牌——“凌鹰”。
手动葫芦(包括手拉葫芦和手板葫芦)作为一种简便实用的轻小型起重工具在使用中往因为超载工作而导致许多不良后果。为了有效地避免超载, 在手动葫芦原结构基础上,设计一种超载保护装置———限载器,从而可提高手动葫芦的使用安全性。那么他的工作原理是怎样的?
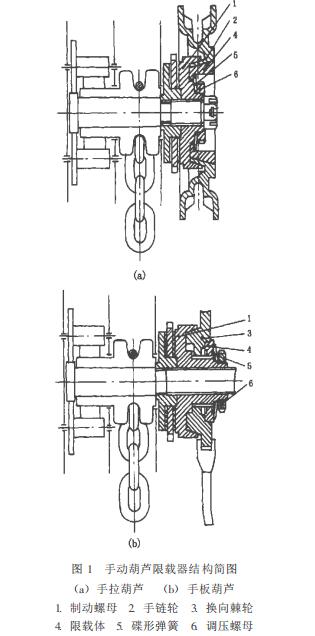
如图1所示,手动葫芦限载器由调压螺母、碟形弹簧、限载体、手链轮(换向棘轮)、制动螺母组成,其中限载体与制动螺母以花键配合。根据用户要求给手动葫芦设定提升时的限载
值,即打滑点。调整调压螺母,碟形弹簧压紧限载体,使得限载体的外锥面、制动螺母的内锥面分别与手链轮(换向棘轮)的2个锥面紧密贴合,形成2对摩擦副,从而产生限载摩擦力矩提升重物时, 拉动手拉链 (或扳动手柄)若负载大于限载值,此时手拉力矩(手扳力矩)大于限载摩擦力矩, 锥面间打滑警示超载,若负载小于限载值,此时可以安全正常工作。
上一条:倒链和导链区别
下一条:手拉葫芦齿轮齿顶高的分析和选择

