
本站主营产品:手拉葫芦
版权所有 Copyright(C)2009-2012 北京市凌鹰起重机械厂 备案号 京ICP备11048170号-5
销售热线:18611422090
传真:010-58043523
邮箱:beijinglingying@126.com 邮编:102200
北京凌鹰起重机械厂产品涵盖手拉葫芦、手扳葫芦、电动葫芦、吊装带、起重链条、滑轮、吊钩、吊具、紧线器、钢丝绳等。凌鹰公司是手动葫芦的生产基地。是一家集研发设计、精工制造、进出口贸易、网销为一体的起重机械专业厂家,公司创建于1998年。经过多年的努力,拥有了起重行业的优质产品,创立了自己的品牌——“凌鹰”。
手拉葫芦是一种以焊接环链作为挠性秉承重件的起重设备,它可以单独使用,也可以与手动单轨小车配套使用,组成起重小车用于手动梁式起重机或架空单轨运输系统中。
我国生产的HS型系列手拉葫芦有多种规格。起重量为0.5-2.5t时,标准起升高度为2.5m,起重量为3-30t时,标准起升高度为3m。若选用较长的链条,则可增大起升高度,一般租掉高度可达12m。满载时的手拉力一般为300-420N。起重量为20t、30t时,装有两条手拉链,并由两人操作。
手拉葫芦的结构和传动形式很多,目前使用较多的有两类,现分述如下。
一、蜗杆传动的手拉葫芦
如图11-3a所示,蜗杆传动的手拉葫芦由驱动部件(牵引链条3和链轮4)、传动部件(蜗杆9和涡轮7、载重作用式制动器8)和工作部件(片式关节链10和链轮2)等组成。
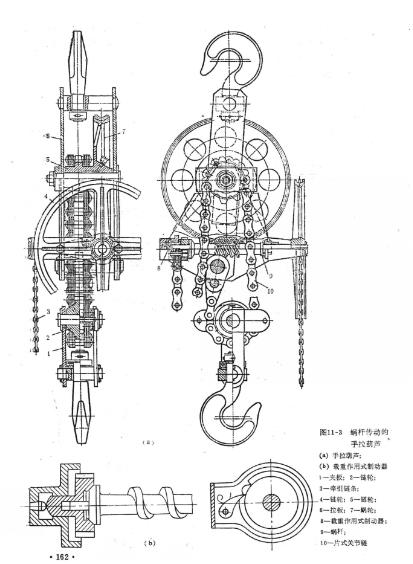
在这种手拉葫芦中采用了载重作用式制动器,这种制动器的结构示于图11—3b中。蜗杆传动为非自锁的,不论起升和下降重物时,链轮上的载荷力矩通过蜗轮传给蜗杆,在蜗杆轴上产生的力矩总是保持其方向不变,因而只要悬吊重物,在蜗杆轴上就会产生轴向力P,且总是使内、外锥盘处于压紧状态。当蜗杆带动棘轮向重物起升方向(顺时针)旋转时,棘轮并不受棘爪的阻碍。在蜗杆停止转动后,重物的自重使蜗杆反转,但这时棘轮被棘爪顶住,
并且由于它是按蜗杆轴向力P在内、外锥盘间产生的摩擦力矩大于重物自重在蜗杆轴上产生的力矩这种条件设计的,因而蜗杆轴与棘轮能一起被棘爪阻止住,以致整个葫芦和重物都能可靠地停住。
当需要重物下降时,必须施加一个沿逆时针方向旋转的力矩,当此力矩和重物自重引起的力矩合在一起能克服内、外锥盘问的摩擦力矩时,重物就开始下降,而且重物的下降速度仍由这个力矩来控制。
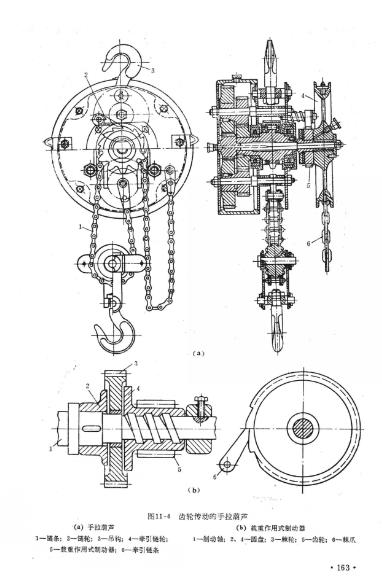
二、齿轮传动的手拉葫芦
如图11—4a(见p163)所示,齿轮传动的手拉葫芦由牵引链条6和牵引链轮4作为驱动部件,齿轮传动将扭矩和运动传给链轮2和链条1,再由它们将重物升降。在这种手拉葫芦中采用了载重作用式制动器5。这种制动器的结构示于图11—4b中。棘轮3自由地套在制动轴1(即主动轴)上,圆盘2用键固定在制动轴上,而圆盘4与传动装置的主动齿轮5做成一体,并用矩形或梯形螺纹联接在轴上。螺纹的旋向要设计得当,即当轴向起升方向旋转时,作用在轴上的力矩迫使圆盘2、4压紧棘轮的两侧,在接触面的摩擦力作用下,圆盘和棘轮开始与轴一起旋转。这时要求棘爪6在棘轮3上滑过,而不妨碍起升重物。当起升运动停止后,重物自重在齿轮5上产生的力矩仍然使圆盘和棘轮处于压紧状态,这时重物要带动齿轮5和棘轮一起向下降的方向旋转,但由于遭到棘爪的阻碍而停止。
当轴向下降的方向旋转时,齿轮5连同圆盘4便沿着螺纹向右移动不再压紧棘轮,这时棘轮与圆盘间的摩擦力减小,以致再不能起制动作用,因此,重物在自重的作用下开始自由下降。这时齿轮5与轴也一起向下降的方向旋转,如齿轮的转速超过了轴的转速,则圆盘与棘轮又将被重新压紧而产生制动作用。如果继续摇轴使其反转,则重物又将继续下降。
载重作用式制动器在下降重物时的制动主要靠重物自重的作用,而外力只是用来维持一定的下降速度,因此工作起来比较轻便。
上一条:手拉葫芦提升边柱倒装法安装转化器壳体
下一条:国内外手拉葫芦发展情况对比

